
视场
在选择适合的视场时,通常需要考虑以下因素:
镜头放大倍率:镜头的放大倍率决定了图像在相机传感器上的放大程度,直接影响到视场的大小。选择合适的镜头放大倍率可以确保目标物体被适当地放大,有利于后续的图像分析处理。
相机芯片尺寸:不同尺寸的相机芯片对视场的覆盖范围有显著影响。较大的芯片可以提供更广阔的视场,适合大范围捕捉;较小的芯片则适用于对细节有高要求的应用。
在光学系统中,分辨率是指两个相邻物体点(或像点)之间能够被系统分辨开的最小距离。我们通常将镜头的物方分辨率和像方分辨率分别记为 Resolution(物)和 Resolution(像)。其单位为微米(µm),并通过以下公式计算:
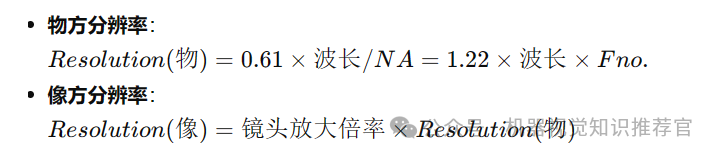
另一个相关的指标是解像力,表示每毫米内的黑白线对数,以 Resolving power 记为 line/mm 或 lp/mm。计算公式如下
Resolvingpower=1/Resolution(像)
镜头与相机的分辨率匹配
工程师们通常会将注意力集中在相机的分辨率上,而忽视了镜头分辨率的重要性。实际上,只有当相机和镜头的分辨率匹配时,才能实现最佳成像效果。图像清晰度与两者的匹配密切相关。
物方的两个点在相机芯片上成像的最小距离需满足如下条件,才能被清晰分辨。以相机像元尺寸为 5 微米、镜头放大倍率为 0.5 倍为例:
Resolution(物) = 2 X 5um / 0.5 = 20um
分辨率与精度的区分
镜头的物方分辨率与测量精度容易混淆,但两者有明显区别。精度指的是测量值与真实值之间的差异。比如,如果产品的实际尺寸为 1.0 毫米,精度要求为 ±5 微米,则只要测得的值在 0.995 毫米至 1.005 毫米之间,即符合精度要求。
在机器视觉中,通常根据客户的视场(FOV)和精度要求计算相机分辨率。选定相机后,像元尺寸即确定。在此基础上,再选择与相机匹配的镜头分辨率,以确保系统达到精度要求。例如,如果客户需要观察 5 微米大小的目标物体,镜头的物方分辨率需小于 10 微米。
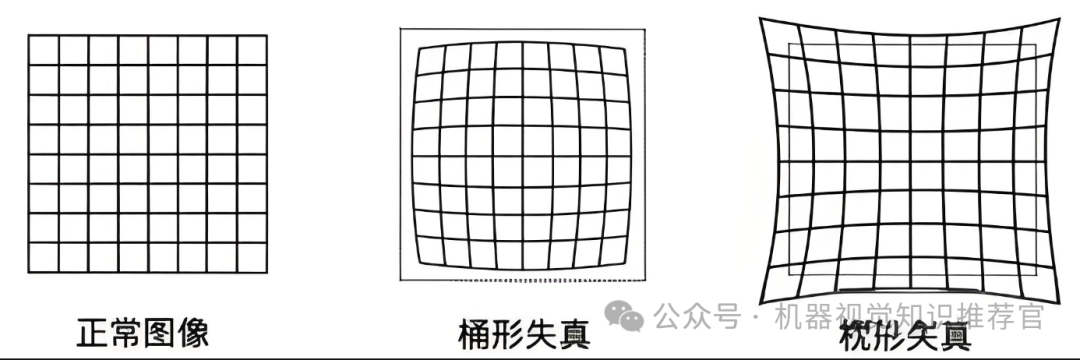
畸变是光学系统中的一个常见参数,是影响光学测量精度的重要因素之一。它体现的是物体成像的失真程度,通常导致成像的变形但不会对图像的清晰度产生直接影响。
理想与实际光学系统的差异
在理想光学系统中,物像平面上应该保持恒定的放大率。但在实际的光学系统中,这一特性仅在视场较小时适用。当视场增大时,成像的放大率会随视场变化,使得图像相对于物体失去相似性,从而导致变形。这个成像缺陷被称为畸变。
畸变的定义
畸变通过实际成像高度与理想成像高度的差值来定义,在实际应用中,常用其与理想成像高度的比率表示,称为相对畸变。
正畸变意味着图像随着视场增大而比理想成像高度增加得更快,放大倍率随视场增大而增大。同心圆的间距从内向外逐渐增大。
负畸变则相反,图像随着视场增大而比理想成像高度增长得更慢,导致放大倍率随视场增大而减小。同心圆的间距从内向外逐渐缩小。
畸变对测量的影响
虽然在普通成像应用中,轻微的变形可能不明显,但在需要高精度测量的场景中,畸变会对测量准确性产生严重影响。通常,普通工业镜头的畸变在1%-2%之间,这种畸变可能使得100毫米的物体在测量中显示为101毫米到102毫米。
减少畸变的解决方案
使用双远心镜头是减少畸变的有效解决方案之一。这类镜头的畸变通常小于0.1%,是普通镜头的1/20,大幅提高了测量精度和稳定性,并达到了目前光学测试仪器的最高标准。通过选择这类镜头,可以确保对物体尺寸的高精度测量,同时减少因畸变导致的误差。
 sales@huakecamera.com
sales@huakecamera.com 159 8924 0809
159 8924 0809 销售
销售